背景
在 RMSNorm 的实现中,都会强制把输入转为 float32 再进行计算,主要为了避免在计算过程中出现溢出的情况,特别是 float16。
bfloat16 由于动态范围更大,通常不会出现溢出问题,但在一些特定的计算场景下,仍然可能会遇到精度问题。因此,在实现 RMSNorm 时,强制转换为 float32 是一个通用的做法。
RMSNorm
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| import torch
import torch.nn as nn
class RMSNorm(nn.Module):
def __init__(self, dim, eps=1e-8):
super(RMSNorm, self).__init__()
self.weight = nn.Parameter(torch.ones(dim))
self.eps = eps
def forward(self, x):
x = x.to(torch.float32)
rms = torch.sqrt(x.pow(2).mean(dim=-1, keepdim=True) + self.eps)
return self.weight * x / rms
|
如果不转为 float32,精度情况
如果不将输入转换为 float32,直接使用 float16 进行计算,可能会导致数值精度的问题。例如,在计算 RMS 时,由于 float16 的表示范围和精度有限,可能会出现梯度消失或爆炸的情况,从而影响模型的训练效果。如下图,
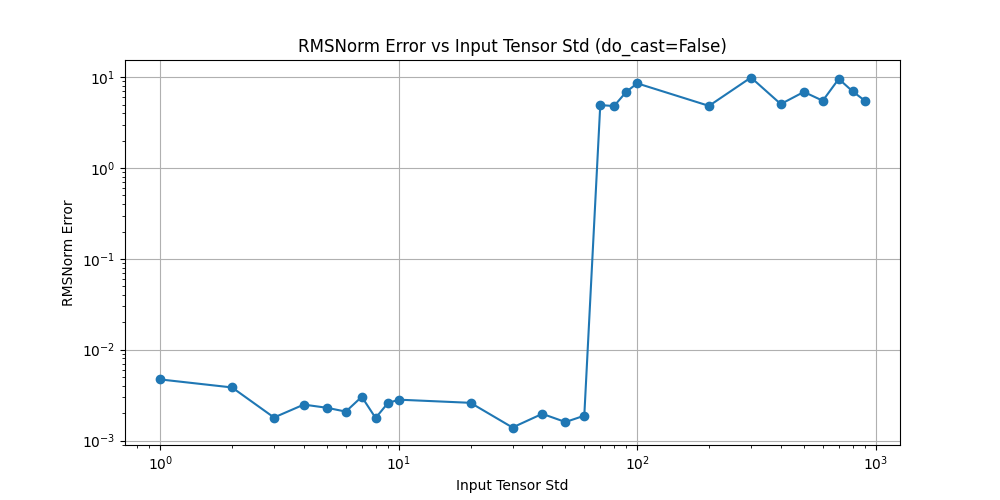
可以看到,std 在达到 70 之后,f32 和 f16 计算的误差马上就从 0.001 上升到 8.0,此时发生了 f16 的溢出,导致 RMSNorm 的输出变为 Infinity。
由于 float16 的表示范围有限,最大值只有 65504,很容易溢出。在 RMSNorm 中溢出的场景有两个:
- 求和溢出:当输入的数据过大时,求和的结果可能超过这个范围,导致溢出为 Infinity
- 平方溢出:在计算平方时,如果输入的数值过大,平方后的结果也会超过 float16 的表示范围,导致溢出为 Infinity
如果转为 float32,精度情况
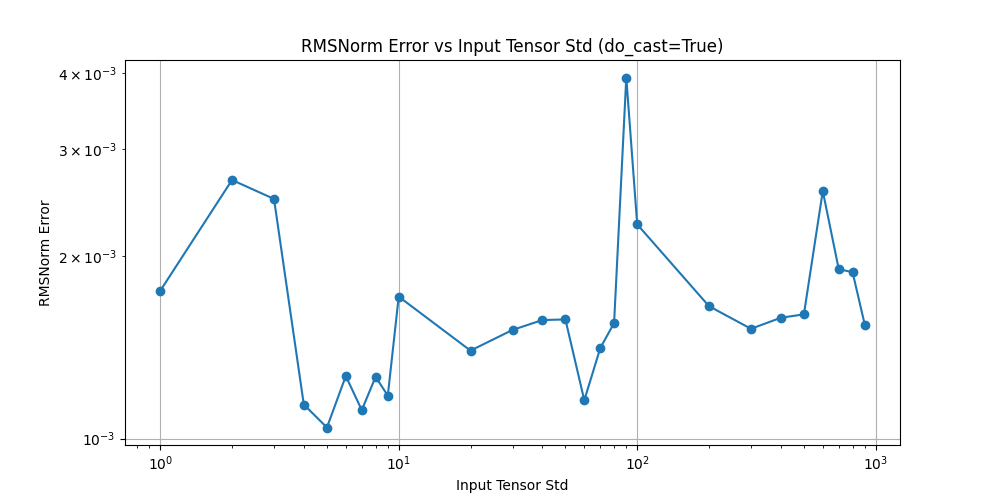
如果将输入转换为 float32,计算过程中的数值精度问题会得到有效缓解。如下图所示,最大误差不超过 4e-3。
PyTorch 中的 LayerNorm 实现
PyTorch 官方提供了 LayerNorm 算子,可以直接调用。为了避免产生 f16 的溢出问题,PyTorch 在实现中将输入 data-type 和累积 data-type 分离。具体来说,输入数据仍然是 float16,但在计算过程中会转换为 float32 进行处理,最后再转换回 float16。
vectorized_layer_norm_kernel_impl 实现如下。可以看到,输入数据 X 是 float16 类型,但是累加结果时使用的是 T_ACC(通常是 float32),最后拷贝到输出 Y 时会进行隐式类型转换。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
| template <typename T, typename T_ACC,
typename std::enable_if_t<!std::is_same_v<T, double>, int> = 0>
__device__ __inline__ void vectorized_layer_norm_kernel_impl(
const int N,
T_ACC eps,
const T* __restrict__ X,
const T* gamma,
const T* beta,
T_ACC* mean,
T_ACC* rstd,
T* Y){
extern __shared__ float s_data[];
auto i1 = blockIdx.x;
const T * block_row = X + i1 * N;
WelfordDataLN wd = compute_stats(block_row, N, s_data);
using vec_t = aligned_vector<T, vec_size>;
const vec_t * X_vec = reinterpret_cast<const vec_t*>(block_row);
const vec_t * gamma_vec = (gamma != nullptr) ? reinterpret_cast<const vec_t*>(gamma) : nullptr;
const vec_t * beta_vec = (beta != nullptr) ? reinterpret_cast<const vec_t*>(beta) : nullptr;
vec_t * Y_vec = reinterpret_cast<vec_t*>(Y + i1 * N);
const int numx = blockDim.x * blockDim.y;
const int thrx = threadIdx.x + threadIdx.y * blockDim.x;
const int n_vec_to_read = N/vec_size;
T_ACC rstd_val = c10::cuda::compat::rsqrt(wd.sigma2 + eps);
for (int i = thrx; i < n_vec_to_read; i += numx) {
vec_t data = X_vec[i];
vec_t out;
#pragma unroll
for (int ii=0; ii < vec_size; ii++){
out.val[ii] = static_cast<T_ACC>(gamma_vec[i].val[ii]) * (rstd_val * (static_cast<T_ACC>(data.val[ii]) - wd.mean))
+ static_cast<T_ACC>(beta_vec[i].val[ii]);
}
Y_vec[i] = out;
}
if (thrx == 0) {
mean[i1] = wd.mean;
rstd[i1] = rstd_val;
}
}
|
